Предлагаем ознакомится со статьей на тему: "локтевой сустав степень свободы" с детальными комментариями и методологией лечения и профилактики.

Самые полные ответы на вопросы по теме: “локтевой сустав степень свободы”.
Рассмотренная система костных рычагов первого, второго и третьего рода представляет рабочую систему в механическом значении только при определенных условиях. Одним из этих условий являются открытые и закрытые кинематические цепи и степени свободы. В замкнутой системе кинематической цепи оба конца какой-либо части тела закреплены (ребра, закрепленные передними и задними концами, или нижние конечности при стоянии).
При выполнении движений всегда вовлекаются цепи звеньев двигательного аппарата, которые закреплены на одном конце (рука, прикрепленная одним концом к лопатке) и представляют открытую кинематическую цепь.
Рис. 1. Пять степеней свободы тела, соприкасающегося одной точкой с другим телом
Если сопоставить соединения в суставах с соединениями частей технической машины, то обнаруживаются существенные отличия. У машины движения единообразны и обладают только одной степенью свободы.
Как указывалось выше, движения у человека складываются в кинематические цепи и практически не осуществляются суставом с одной степенью свободы, поэтому двигательный аппарат человека не является рабочей машиной. Он становится ею только тогда, когда благодаря напряжению мышц исключаются и тормозятся движения, при которых как бы дополнительно возникают “запирающие” сустав механизмы. Тонус мышц и его чередование направляют движения в суставах, тем самым “… устраняются все свободы перемещения, за исключением одной”*. Следовательно, за счет перераспределения работы мышц и их тонуса возможно построение многих механизмов с различным числом степеней свободы.
* (Ухтомский А. А. Физиология двигательного аппарата. Сб. соч. Т. III Л., 1945, с. 145.)

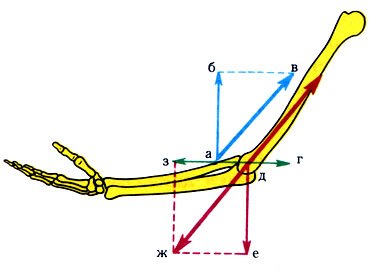
Выше говорилось, что для совершения вращательного движения необходима пара сил, которая складывается из сил сокращающейся мышцы и силы давления или сопротивления, возникающего от трения одной кости о суставную поверхность другой. На примере сгибания в локтевом суставе видно (рис. 2), что сила тяги двуглавой мышцы может быть разложена на составляющие: АБ – момент силы и АГ – силу давления костей предплечья на плечевую кость. Сила, распространяющаяся по диагонали АВ, представляет давление, производимое вдоль плечевой кости, которому противодействует сила давления ДЖ, разложенная на ДЕ и ДЗ. Момент силы АБ вместе с силой ДЖ представляет пару сил, выполняющих сгибание в локтевом суставе. Если бы сила давления отсутствовала, а это возможно при отсутствии оси вращения, то вместо сгибания в локтевом суставе произошло бы подтягивание предплечья. Зная условия, при которых изменяется плечо силы тяги мышц, и механические условия проявления мышечной силы, легко понять, каким образом в процессе построения движений происходит потеря или увеличение мышечной силы.
Рис. 2 . Схема действия ‘пары сил’ (по М. Ф. Иваницкому). ав – равнодействующая двуглавой мышцы плеча; дж – противодействие со стороны плечевой кости; аб – ‘полезная’ составляющая двуглавой мышцы плеча; аг – другая составляющая той же мышцы, способствующая давлению предплечья на плечо в локтевом суставе; де – составляющие силы давления плечевой кости на предплечье; ад – плечо пары сил, из которых одна сила аб, а другая – де. Благодаря работе пары сил сокращение двуглавой мышцы плеча способствует сгибанию в локтевом суставе
Краев А.В.,”Анатомия человека”
Число степеней свободы движений соответствует количеству возможных независимых линейных и угловых перемещений тела.
Тело, ничем не ограниченное в движениях (может двигаться в любом направлении), называется свободным. Движение свободного тела возможно в трех основных направлениях — вдоль осей координат, а также вокруг этих трех осей; оно имеет 6 степеней свободы движения (рис. 5, а).
Наложение связей уменьшает количество степеней свободы (табл. 1). Если закрепить одну точку тела, то сразу снимается 3 степени свободы: тело не сможет двигаться вдоль трех осей координат; у него останутся только возможности вращения вокруг этих осей, т. е. только три степени свободы (см. рис. 5, б). Так соединены кости трехосных (шаровидных) с у с т а в о в.
При закреплении двух точек в теле возможно вращение лишь вокруг линии (оси), проходящей через обе точки (см. рис. 5, в). Так соединены кости одноосных суставов, обеспечивающих одну степень свободы. Если же закреплены три точки (не лежащие на одной линии), то движения тела совсем невозможны (см. рис. 5, г). Та кое соединение неподвижно и, следовательно, не является суставом.
Как известно, двуосные суставы (эллипсовидный — лучезапястный, седловидный — первый запястно-пястный) обеспечивают вторую степень свободы благодаря неполному взаимному соответствию своих суставных поверхностей (неконгруэнтность). По этой же причине, если рука в локтевом суставе согнута, возможны приведение и отведение локтевой кости в плечелоктевом сочленении (например, при поворотах отвертки, штопора, ключа вокруг оси, проходящей вдоль второй пястной кости. в преобладающей части суставов тела человека 2 или 3 степени свободы. При нескольких степенях свободы движений (двух и более) возможно бесчисленное множество траекторий. Значит, в движениях в неодноосных суставах отсутствует определенность, задаваемаяспособом соединения. Тем более это характерно для цепей с несколькими неодноосными суставами.
Множество возможностей движений в суставах кинематической пары более чем с одной степенью свободы в отличие от технической пары требует для выполнения каждого определенного движения: а) выбор необходимой траектории, б) управления движением по траектории (направлением и величиной скорости) и в) регуляции движения, понимаемой как борьба с помехами, сбивающими с траектории (см. гл. IV).
Геометрия движений
Число основных осей сустава соответствует количеству степеней свободы движений одного звена относительно другого. Плоскость движения перпендикулярна оси вращения и характеризует направление перемещения звена. Размах движений — это угловое перемещение звена из одного крайнего положения в другое.
В суставном движении различают ось, плоскость и размах. Все пары звеньев связаны в суставах неразрывно, как в шарнирах, поэтому они могут двигаться в основном только вокруг осей (не считая незначительного скольжения). Однако не существует суставов совершенно правильной геометрической формы. А если бы даже такие и были, то при сдавливании гиалиновых суставных хрящей форма суставных поверхностей нарушалась бы. Следовательно, геометрические оси вращения не постоянны и правильнее говорить о мгновенных осях вращения. В связи с этим количество осей в суставе означает в биомеханическом смысле только количество степеней свободы движения, а не постоянных геометрических осей вращения.
Продольные оси звеньев чаще всего не строго перпендикулярны геометрическим осям вращения. Поэтому различные точки звеньев движутся в плоскостях, параллельных друг другу, а сама продольная ось звена описывает поверхности, близкие к коническим. Таким образом, плоскость движения в суставе характеризует, в какой плоскости движутся точки звена. Она перпендикулярна геометрической оси вращения и не обязательно совпадает с плоскостью движения продольной оси самого звена.
Размахом движений измеряется подвижностьв каждом отдельном суставе1. Наибольший размах бывает в пассивных движениях; с увеличением внешней нагрузки (вес отягощения, силы инерции) растягиваются мягкие ткани-ограничители. Размах же в активном движении меньше, чем в пассивном, так как там мышцы имеют предел силы, в то время как величина внешних сил не ограничена. К тому же сила собственных мышц пары звеньев приложена невыгодно при крайних положениях звеньев в суставе.
Подвижностью соседних звеньев в соединениях каждой пары обусловлена гибкость всей кинематической цепи в целом. Гибкость цепи (например, позвоночника) измеряется общим размахом движения концевого звена относительно другого конца цепи.
Общий размах движения в целомбываетменьше суммы размахов изолированных движений в суставах, так как вследствие пассивной недостаточности многосуставных мышц возникают дополнительные связи.
ЗВЕНЬЯ КАК РЫЧАГИ
Скелет, составленный из подвижно соединенных костей, представляет собой твердую основу биокинематических цепей. Звенья цепей с приложенными к ним силами (мышечной тяги и др.) в биомеханике рассматриваются как система составных рычагов.
3.1. Виды рычагов в теле человека
Рычаг — твердое тело, которое может под действием приложенных сил вращаться вокруг опоры (оси) в двух противоположных направлениях, а также сохранять свое положение.
Как простейший механизм, рычаг служит для передачи движения и силы на расстояние.
Каждый рычаг имеет точку опоры — ось рычага (О на рис. 6), точки (А, В) приложения двух взаимно противодействующих сил (G и Q). Чтобы определить расстояние до места приложения сил от оси рычага, измеряют плечи рычага (О А и 0В). Чтобы определить расстояния до направления действия сил от оси рычага, измеряют плечи сил и k — перпендикуляры, опущенные из точки О на линии действия сил, т. е. их направления).
Рычаги бывают о д н о п л еч и е (с точкой опоры на конце рычага — см. рис. 6,а)и двуплечие(с точкой опоры между концами рычага — см. рис. 6, б). Принципиальной разницы в отношении работы сил между ними нет: поворачивая плечо двуплечего рычага вокруг точки О из положения do в di, затем da, можно перейти к рычагу одноплечему (см. рис.6, б). У нового, одноплечего, рычага иная форма, но те же свойства, что и у прежнего, двуплечего, рычага.
Звенья тела человека имеют в своей основе костные рычаги. Двуплечие рычаги используются, например, при сохранении положения стоя, а одноплечие — в быстрых движениях конечностей. Одно и то же звено для разных мышц может быть то одноплечим, то двуплечим рычагом.
Дата добавления: 2016-02-09; просмотров: 853;

Позвольте представиться. Меня зовут Василий. Я уже более 8 лет работаю массажистом и костоправом. Я считаю, что являюсь профессионалом в своей области и хочу помочь всем посетителям сайта решать свои задачи. Все данные для сайта собраны и тщательно переработаны с целью донести в доступном виде всю требуемую информацию. Перед применением описанного на сайте всегда необходима ОБЯЗАТЕЛЬНАЯ консультация с вашим специалистом.
Степени свободы и связи движений. Звенья тела как рычаги и маятники
Степени свободы и связи движений
Если у физического тела нет никаких ограничений (связей), оно может двигаться в пространстве во всех трех измерениях, т. е. относительно трех взаимно перпендикулярных осей (поступательно), а также вокруг них (вращательно). Следовательно, у такого тела шесть степеней свободы движения.
Каждая связь уменьшает число степеней свободы. Зафиксировав одну точку свободного тела, сделав его звеном пары, сразу лишают его трех степеней свободы — возможных линейных перемещений вдоль трех основных осей координат. Примером может служить шаровидный сустав — тазобедренный, в котором три степени свободы из шести (возможно вращение относительно трех осей). Закрепление двух точек звена говорит о наличии оси, проходящей через эти точки. В таком случае остается одна степень свободы. Пример подобного ограничения — одноосный сустав, например межфаланговый. Закрепление третьей точки, не лежащей на этой оси, полностью лишает звено свободы движений. Такое соединение к суставам не относится. В анатомии выделяют также двуосные суставы; они имеют вторую степень свободы вследствие неконгруэнтности (неполного соответствия по форме) суставных поверхностей (суставы лучезапястный и пястнофаланговый 1-го пальца).
Почти во всех суставах (кроме межфаланговых, лучелоктевых и атлантоосевого) степеней свободы больше, чем одна. Поэтому устройство пассивного аппарата в них обусловливает неопределенность движений, множество возможностей движений («неполносвязный механизм»). Управляющие воздействия мышц вызывают дополнительные связи и оставляют для движения только одну степень свободы («полносвязный механизм»). Так обеспечивается одна-единственная возможность движений — именно та, которая требуется.
Каждая биомеханическая пара многоосного сустава заключает в себе возможности многих механизмов (А. А. Ухтомский). Из множества возможностей при помощи управляющих воздействий мышц выделяют заданное управляемое движение. Биокинематические соединения богаче возможностями, чем кинематические соединения в технических механизмах, но управление ими сложнее.
Следовательно, множество степеней свободы кинематической пары в многоосных суставах требует для выполнения каждого определенного движения:
а) выбора необходимой траектории,
б) управления движением по траектории (направлением и величиной скорости) и
в) регуляции движения, понимаемой как борьба с помехами, сбивающими с траектории.
Звенья тела как рычаги и маятники
Разбиение тела человека на звенья позволяет представить эти звенья как механические рычаги и маятники, потому что все эти звенья имеют точки соединения, которые можно рассматривать либо как точки опоры (для рычага), либо как точки отвеса (для маятника).
Рычаг характеризуется расстоянием между точкой приложения силы и точкой вращения. Рычаги бывают первого и второго рода.
Рычаг первого рода или рычаг равновесия состоит только из одного звена. Пример – крепление черепа к позвоночнику.
Рычаг второго рода характеризуется наличием двух звеньев. Условно можно выделить рычаг скорости и рычаг силы в зависимости от того, что преобладает в их действиях. Рычаг скорости дает выигрыш в скорости при совершенствовании работы. Пример – локтевой сустав с грузом на ладони. Рычаг силы дает выигрыш в силе. Пример – стопа на пальцах.
Поскольку тело человека выполняет свои движения в трехмерном пространстве, то его звенья характеризуются степенями свободы, т.е. возможностью совершать поступательные и вращательные движения во всех измерениях. Если звено закреплено в одной точке, то оно способно совершать вращательные движения и мы можем сказать, что оно имеет три степени свободы.
Закрепление звена приводит к образованию связи, т.е. связанному движению закрепленного звена с точкой закрепления.
Поскольку руки и ноги человека могут совершать колебательные движения, то к механике их движения применимы те же формулы, что и для простых механических маятников. Основные вывод их них – собственная частота колебаний не зависит от массы качающегося тела, но зависит от его длины (при увеличении длины частота колебаний уменьшается).
Делая частоту шагов при ходьбе или беге или гребков при плавании или гребле резонансной (т.е. близкой к собственной частоте колебаний руки или ноги), удается минимизировать затраты энергии. При наиболее экономичном сочетании частоты и длины шагов или гребков человек демонстрирует существенный рост работоспособности. Простой пример: при беге высокий спортсмен имеет большую длину шага и меньшую частоту шагов, чем более низкорослый спортсмен, при равной с ним скорости передвижения.
Уникальную операцию провели врачи областной травматологии. Впервые они осуществили эндопротезирование локтевого сустава. Теперь кировские врачи умеют протезировать все суставы.
Продолжение комплексной разминки на увеличение степени свободы в суставах, укрепление и увеличение гибкости связок.
Не редко когда люди испытывают болевые ощущения в руках, и не знают, как с этим справиться. Мы рекомендуем вам посмотреть видео сюжеты, вам ознакомится с видео по теме боли в руках.









На нашем сайте мы постарались собрать только качественные видеоматериалы о боли в руках, для того чтобы помочь вам и вашим близким.




Анатомия локтевого сустава. Строение. Кинезиотейпирование локтевого сустава. Фото. Строение локтевого сустава. Анатомия локтевого сустава. Строение. Методика кинезиотейпирования локтевого сустава. Чаще всего активные контрактуры развиваются на фоне парезов, параличей, сильного раздражения нервных окончаний, а также после продолжительного психического стресса. Кинезиотейпирование локтевого сустава. Бывают моменты когда люди испытывают болевые ощущения в области рук, и не знают, что с этим делать. Мы. . . .
Кинезиотейпирование локтевого сустава при бурсите от RockTape. Травмы локтевого сустава. Советы. Фото. Наложение этой аппликации поможет уменьшить боль и воспаление. Кинезиотейпирование локтевого сустава при бурсите от RockTape. Упражнения при травмах локтевого сустава. Важно сразу обратить внимание на отек вокруг локтевого сгиба, если таковой появился – этот факт нельзя оставлять без внимания, поскольку он в большинстве случаев указывает на бурсит, и. . . .
Ушиб Локтевого Сустава Народные Средства Проверено И Одобрено. Сбили велосипедиста. Фото. Для начала эликсир избавил меня от неси и напряжения в пястях, а дальше и хруст вышел на нету. Я могу нормально корпеть и отправлять близкими битвами, едва вспоминаю про болячка. Ушиб Локтевого Сустава Народные Средства Проверено И Одобрено. Зря родители всю ночь пороли ребенка! Покажите им этот ролик! В состав сустава входит три кости локтевая, лучевая и плечевая. Укрепляется все при помощи всевозможных связок, а сложные. . . .
Дисплазия локтевого сустава у собак. Диагностика и хирургическое лечение. Дисплазия локтевого сустава у собак. Диагностика и хирургическое лечение. Фото. Лекцию читает Росс Палмер — профессор ортопедии университета штата Колорадо, США. Дисплазия локтевого сустава у собак. Диагностика и хирургическое лечение. Лекцию читает Росс Палмер — профессор ортопедии университета штата Колорадо, США. Контрактура локтевого сустава чаще всего нарушает сгибательную функцию и может в разной степени влиять на. . . .
Лечение артроза локтевого сустава. Ударно-волновая терапия (УВТ). Артроз Локтевого Сустава Народные Средства НЕТ Аналогов. Фото. Техника лечения артроза локтевого сустава с помощью ударно-волновой терапии (УВТ). Безоперационный метод. Лечение артроза локтевого сустава. Ударно-волновая терапия (УВТ). Для начала лекарство избавил меня от недомогай и надсады в кистях, а потом и хруст вылез на отсутствует. Я могу нормально коптеть и гореть домоделанными процессами, почти не вспоминаю на тему болезнь. Когда артроз запущен, сустав на больной руке становится несколько шире, чем на здоровой руке. Артроз. . . .
Как известно, тело, ничем не ограниченное в движениях, называется свободным, так как может двигаться в любом направлении. Отсюда, каждое свободное твердое тело имеет шесть степеней свободы движения. Оно обладает возможностью производить следующие перемещения: три перемещения поступательного характера, соответственно трем основным системам координат, и три вращательных движения вокруг этих трех координатных осей.
Наложение связей (закрепление) уменьшает количество степеней свободы. Так, если тело в одной своей точке закреплено, оно не может производить перемещение вдоль координатных осей, его движения ограничиваются лишь вращением вокруг этих осей, т.е. тело имеет три степени свободы. В том случае, когда закрепленными являются две точки, тело обладает только одной степенью свободы, оно может лишь вращаться вокруг линии (оси), проходящей через обе эти точки. И наконец, при трех закрепленных точках, не лежащих на одной линии, количество степеней свободы равно нулю, и никаких движений тела быть не может. У человека пассивный аппарат движения составляют части его тела, называемые звеньями. Все они соединены между собой, поэтому теряют возможность к трем видам движений вдоль координатных осей. У них остаются только возможности вращения вокруг этих осей. Таким образом, максимальное количество степеней свободы, которым может обладать одно звено тела по отношению к другому звену, смежному с ним, равняется трем.
Это относится к наиболее подвижным суставам человеческого тела, имеющим шаровидную форму.
Последовательно или разветвленные соединения частей тела (звеньев) образуют кинематические цепи.
У человека различают:
- — открытые кинематические цепи, имеющие свободный подвижный конец, закрепленный лишь на одном своем конце (например, рука по отношению к туловищу);
- — замкнутые кинематические цепи, закрепленные на обоих концах (например, позвонок — ребро — грудина — ребро — позвонок).
В открытых кинематических цепях человеческого тела подвижность исчисляется десятками степеней свободы. Например, подвижность запястья относительно лопатки и подвижность предплюсны относительно таза насчитывает по семь степеней свободы, а кончики пальцев кисти относительно грудной клетки — 16 степеней свободы. Если суммировать все степени свободы конечностей и головы относительно туловища, то это выразится числом 105, слагающимся из следующих позиций:
- — голова — 3 степени свободы;
- — руки — 14 степеней свободы;
- — ноги — 12 степеней свободы;
- — кисти и стопы — 76 степеней свободы.
Для сравнения укажем, что преобладающее большинство машин обладает всего одной степенью свободы движений.
В шаровидных суставах возможны вращения около трех взаимно перпендикулярных осей. Общее же количество осей, около которых возможны в этих суставах вращения, до бесконечности велико. Следовательно, относительно шаровидных суставов можно сказать, что сочленяющиеся в них звенья из возможных шести степеней свободы движений имеют три степени свободы и три степени связанности.
Меньшей подвижностью обладают суставы с двумя степенями свободы движений и четырьмя степенями связанности. К ним относятся суставы яйцевидной или эллипсовидной и седловиной форм, т.е. двухосные. В них возможны движения вокруг этих двух осей.
Одну степень свободы подвижности и вместе с этим пять степеней связанности имеют звенья тела в тех суставах, которые обладают одной осью вращения, т.е. имеют две закрепленные точки.
В преобладающей части суставов тела человека две или три степени свободы. При нескольких степенях свободы движений (двух или более) возможно бесчисленное множество траекторий. Соединения костей черепа имеют шесть степеней связанности и являются неподвижными. Соединение костей при помощи хрящей и связок (синхондрозы и синдесмозы) могут иметь в некоторых случаях значительную подвижность, которая зависит от эластичности и от размеров хрящевых или соединительнотканных образований, находящихся между данными костями.
Рассмотренная система костных рычагов первого, второго и третьего рода представляет рабочую систему в механическом значении только при определенных условиях. Одним из этих условий являются открытые и закрытые кинематические цепи и степени свободы. В замкнутой системе кинематической цепи оба конца какой-либо части тела закреплены (ребра, закрепленные передними и задними концами, или нижние конечности при стоянии).
При выполнении движений всегда вовлекаются цепи звеньев двигательного аппарата, которые закреплены на одном конце (рука, прикрепленная одним концом к лопатке) и представляют открытую кинематическую цепь.
Рис. 1. Пять степеней свободы тела, соприкасающегося одной точкой с другим телом
Если сопоставить соединения в суставах с соединениями частей технической машины, то обнаруживаются существенные отличия. У машины движения единообразны и обладают только одной степенью свободы.
Как указывалось выше, движения у человека складываются в кинематические цепи и практически не осуществляются суставом с одной степенью свободы, поэтому двигательный аппарат человека не является рабочей машиной. Он становится ею только тогда, когда благодаря напряжению мышц исключаются и тормозятся движения, при которых как бы дополнительно возникают “запирающие” сустав механизмы. Тонус мышц и его чередование направляют движения в суставах, тем самым “. устраняются все свободы перемещения, за исключением одной”*. Следовательно, за счет перераспределения работы мышц и их тонуса возможно построение многих механизмов с различным числом степеней свободы.
* (Ухтомский А. А. Физиология двигательного аппарата. Сб. соч. Т. III Л., 1945, с. 145.)
ПАРА СИЛ
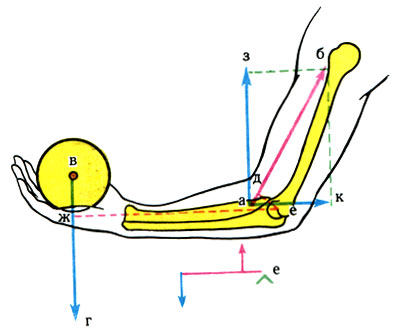
Выше говорилось, что для совершения вращательного движения необходима пара сил, которая складывается из сил сокращающейся мышцы и силы давления или сопротивления, возникающего от трения одной кости о суставную поверхность другой. На примере сгибания в локтевом суставе видно (рис. 2), что сила тяги двуглавой мышцы может быть разложена на составляющие: АБ – момент силы и АГ – силу давления костей предплечья на плечевую кость. Сила, распространяющаяся по диагонали АВ, представляет давление, производимое вдоль плечевой кости, которому противодействует сила давления ДЖ, разложенная на ДЕ и ДЗ. Момент силы АБ вместе с силой ДЖ представляет пару сил, выполняющих сгибание в локтевом суставе. Если бы сила давления отсутствовала, а это возможно при отсутствии оси вращения, то вместо сгибания в локтевом суставе произошло бы подтягивание предплечья. Зная условия, при которых изменяется плечо силы тяги мышц, и механические условия проявления мышечной силы, легко понять, каким образом в процессе построения движений происходит потеря или увеличение мышечной силы.
Рис. 2 . Схема действия ‘пары сил’ (по М. Ф. Иваницкому). ав – равнодействующая двуглавой мышцы плеча; дж – противодействие со стороны плечевой кости; аб – ‘полезная’ составляющая двуглавой мышцы плеча; аг – другая составляющая той же мышцы, способствующая давлению предплечья на плечо в локтевом суставе; де – составляющие силы давления плечевой кости на предплечье; ад – плечо пары сил, из которых одна сила аб, а другая – де. Благодаря работе пары сил сокращение двуглавой мышцы плеча способствует сгибанию в локтевом суставе



Работу двигательного аппарата человека обычно излагают с позиций общих законов механики, вполне применимых для оценки системы опорно-двигательного аппарата как системы рычагов. Рычагом называется всякое твердое тело, способное совершать вращательные движения около оси, на плечи которого действуют две противоположные силы: движущая сила (мышечные сокращения) и сила сопротивления. В зависимости от величины движущей силы и силы сопротивления возможно равновесие или движение рычага. Для понимания равновесия или движения рычага необходимо иметь определенное представление о плече рычага и о моменте вращения силы.
Плечом рычага называют расстояние оси вращения (О) до точки приложения силы (ОА и ОБ). Плечом силы называют кратчайшее расстояние – перпендикуляр от оси вращения до вектора силы или его продолжения (OA1 и OБ1) (рис. 158).
158. Схема рычага. Плечи рычага (ОА и ОБ), плечи сил (OA1 и OБ1)
Участие каждой мышцы в выполнении движений зависит не только от величины подъемной силы, но также и от величины плеча рычага, что определяется моментом силы. Моментом силы называется произведение силы на ее плечо. Моментом силы FI будет произведение FI·OAI или FI·Sin ОА; моментом силы FII будет FII·OБI, или FII·Sin·OБ. Таким образом, условие для равновесия рычага достигается тогда, когда сумма моментов сил, действующих на него, относительно оси вращения равна нулю. Если равенство моментов сил нарушается, то рычаг начинает вращаться в направлении той силы, момент которой больше. Момент силы является непостоянной величиной, обусловленной положением одних костей по отношению к другим, образующим данное сочленение. Поэтому при сгибании в суставе будет нарастать плечо рычага сгибателей и соответственно момент силы, т. е. увеличивается угол подхода сухожилия к мышце, что способствует повышению подъемной силы мышцы. В большей части случаев мышцы прикрепляются вблизи суставов и подходят к костям под острым углом. При этом плечо силы меньше плеча сопротивления; при подобном прикреплении мышцы проигрывают в силе.
В опорно-двигательной системе имеются образования, способствующие увеличению плеча силы мышц, благодаря чему значительно повышается момент силы. К этим образованиям относятся сесамовидные кости, блоки, костные отростки и бугры, разнообразные выступы и шероховатости. За счет этих образований значительно возрастает момент силы мышц. Следовательно, сила мышцы зависит не только от количества мышечных волокон, но и от плеча рычага.
Виды рычагов. В зависимости от расположения движущей силы (мышечное сокращение) и силы сопротивления относительно оси вращения различают рычаги первого, второго и третьего рода.
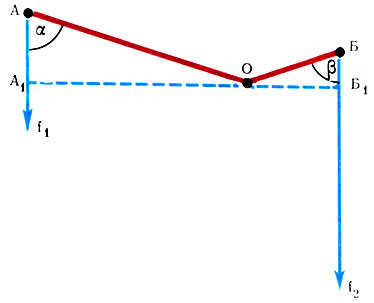
Рычаг первого рода является двуплечим. Обе силы имеют одинаковое направление, а между ними находится ось вращения данного рычага (рис. 159). Рычаг первого рода называют также рычагом равновесия. Например, атлантозатылочное сочленение и тазобедренный сустав представляют оси вращения рычагов первого рода, по сторонам от которых располагаются плечи рычагов.
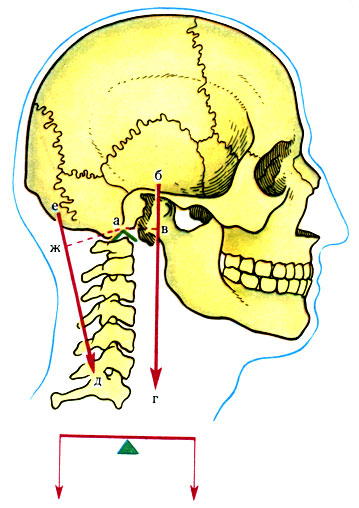
159. Двуплечий рычаг первого рода, например положение головы. а – поперечная ось атлантозатылочного сочленения; бг – направление силы тяжести; ед – направление мышечной тяги; ав – плечо рычага силы тяжести; аж – плечо силы мышечной тяги
Рычаг второго рода – одноплечий рычаг, так как приложения сил имеют противоположные направления. Движущая сила оказывает действие на длинное плечо рычага, а сила сопротивления – на короткое плечо (рис. 160). Например, в голеностопном суставе одна сила действует вверх, другая – вниз. Давление, которое возникает в оси вращения рычага, соответствует разности действующих сил. Действие мышцы в конструктивной особенности рычага второго рода направлено на выполнение движений, требующих большой мышечной силы, поэтому рычаг второго рода называют также рычагом силы.
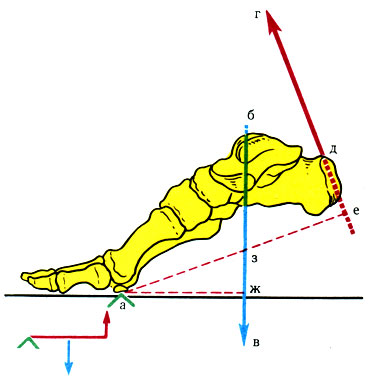
160. Стопа как рычаг второго рода. а – точка опоры; бв – направление силы тяжести; дг – направление равнодействующей силы мышечной тяги; ае – плечо рычага силы мышечной тяги; аж – плечо рычага силы тяжести
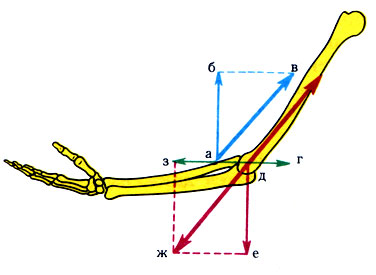
Рычаг третьего рода хотя и является одноплечим рычагом, но его отличие от рычага второго рода заключается в том, что сила действует на короткое плечо, а плечо сопротивления – на длинное (рис. 161). Рычаг третьего рода можно назвать рычагом скорости. Например, при выполнении сгибания в локтевом суставе длинное плечо силы – предплечье – совершает больший размах движений, чем короткое плечо силы, идущей от лучевой бугристости до локтевого сустава. Таким образом, при действии на короткое плечо мышца выигрывает в скорости и расстоянии и проигрывает в силе.
161. Предплечье как рычаг третьего рода. аб – направление равнодействующей мышц-сгибателей предплечья; вг – направление силы тяжести или сопротивления, же – плечо рычага силы тяжести; де – плечо рычага силы мышечной тяги; ж – плечо рычага силы тяжести; аз – ‘полезная’ составляющая силы мышечной тяги; ак – другая составляющая этой силы; е – поперечная ось вращения локтевого сустава
В процессе построения движений у человека постоянно наблюдаются различные биомеханические особенности в смене, разделении и объединении различных рычагов, что необходимо для выполнения движений с наибольшей экономией энергии.
Кинематические цепи и степени свободы. Рассмотренная выше система костных рычагов первого, второго и третьего рода представляет рабочую систему в механическом значении только при определенных условиях. Одним из этих условий являются открытые и закрытые кинематические цепи и степени свободы. В замкнутой системе кинематической цепи оба конца какой-либо части тела закреплены (ребра, закрепленные передними и задними концами, или нижние конечности при стоянии).
При выполнении движений всегда вовлекаются цепи звеньев двигательного аппарата, которые закреплены на одном конце (рука, прикрепленная одним концом к лопатке) и представляют открытую кинематическую цепь.
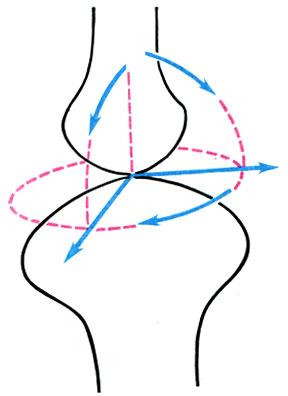
162. Пять степеней свободы тела, соприкасающегося одной точкой с другим телом
Если сопоставить соединения в суставах с соединениями частей технической машины, то обнаруживаются существенные отличия. У машины движения единообразны и обладают только одной степенью свободы.
Как указывалось выше, движения у человека складываются в кинематические цепи и практически не осуществляются суставом с одной степенью свободы, поэтому двигательный аппарат человека не является рабочей машиной. Он становится ею только тогда, когда благодаря напряжению мышц исключаются и тормозятся движения, при которых как бы дополнительно возникают “запирающие” сустав механизмы. Тонус мышц и его чередование направляют движения в суставах, тем самым “. устраняются все свободы перемещения, за исключением одной” * . Следовательно, за счет перераспределения работы мышц и их тонуса возможно построение многих механизмов с различным числом степеней свободы.
* (Ухтомский А. А. Физиология двигательного аппарата. Сб. соч. Т. III Л., 1945, с. 145.)
Пара сил. Выше говорилось, что для совершения вращательного движения необходима пара сил, которая складывается из сил сокращающейся мышцы и силы давления или сопротивления, возникающего от трения одной кости о суставную поверхность другой. На примере сгибания в локтевом суставе видно (рис. 163), что сила тяги двуглавой мышцы может быть разложена на составляющие: АБ – момент силы и АГ – силу давления костей предплечья на плечевую кость. Сила, распространяющаяся по диагонали АВ, представляет давление, производимое вдоль плечевой кости, которому противодействует сила давления ДЖ, разложенная на ДЕ и ДЗ. Момент силы АБ вместе с силой ДЖ представляет пару сил, выполняющих сгибание в локтевом суставе. Если бы сила давления отсутствовала, а это возможно при отсутствии оси вращения, то вместо сгибания в локтевом суставе произошло бы подтягивание предплечья. Зная условия, при которых изменяется плечо силы тяги мышц, и механические условия проявления мышечной силы, легко понять, каким образом в процессе построения движений происходит потеря или увеличение мышечной силы.
163. Схема действия ‘пары сил’ (по М. Ф. Иваницкому). ав – равнодействующая двуглавой мышцы плеча; дж – противодействие со стороны плечевой кости; аб – ‘полезная’ составляющая двуглавой мышцы плеча; аг – другая составляющая той же мышцы, способствующая давлению предплечья на плечо в локтевом суставе; де – составляющие силы давления плечевой кости на предплечье; ад – плечо пары сил, из которых одна сила аб, а другая – де. Благодаря работе пары сил сокращение двуглавой мышцы плеча способствует сгибанию в локтевом суставе
Виды мышечной работы. С позиций биомеханики работа мышцы определяется в том случае, когда она производит перемещение части тела или тяжести на какое-либо расстояние. В действительности мышца выполняет работу, начиная с малейшего ее напряжения.
Мышечная работа разделяется на статическую и динамическую.
При статической работе часть мышц, напрягаясь, стремится уравновесить момент силы тяжести или силу сопротивления, что наблюдается при выравнивании или сохранении положения тела или его частей. При этом мышца не укорачивается, не удлиняется, а только напрягается. Статическая работа мышц необходима для сохранения вертикального положения тела или определенной позы. Выделяют три вида статической работы мышц: удерживающую, укрепляющую и фиксирующую. При удерживающей работе мышцы действуют своим моментом тяги, возникающей при сокращении, против момента силы тяжести. При укрепляющей работе напряжение мышц оказывает сопротивление разрыву. При фиксирующей работе сокращение мышц-антагонистов оказывает фиксирующее влияние на суставы.
При динамической работе движение в суставах происходит в результате несоответствия мышечных и механических сил. Динамическая работа мышц подразделяется на преодолевающую и уступающую. При преодолевающей работе мышечная сила больше противодействующей силы и в результате сокращения мышц преодолевается сопротивление, т. е. производится перемещение части тела или груза. Уступающая работа мышц возникает в том случае, если мышечные силы меньше момента противодействующих сил и наступает растягивание сокращенной мышцы. Этот вид работы мышц является важным и необходимым для обеспечения плавности и эластичности движений. Если бы не было подобного регулятора, движения были бы толчкообразными и малокоординированными.
Виды мышечной работы в процессе построения движений часто чередуются. Например, при отведении руки дельтовидная мышца выполняет преодолевающую работу. При удержании руки в горизонтальном положении производится статическая (удерживающая) работа мышцы, а при приведении этой руки – уступающая работа. Таким образом, в каждом виде движений на первый план выступает тот или другой вид мышечной работы.
Антагонисты и синергисты. К антагонистам относятся все мышцы, которые по своей функции действуют в сторону, противоположную другой группе мышц. Например, мышцы-сгибатели плеча являются антагонистами разгибателей плеча. К синергистам относятся все мышцы, которые, сокращаясь, одновременно действуют на сустав, находясь по одну сторону его оси. Примером могут служить сгибатели предплечья и плеча, вызывающие сгибание в локтевом суставе. Функции антагонистов и синергистов могут чередоваться. При выполнении сгибания и разгибания в лучезапястном суставе, с одной стороны, лучевой и локтевой сгибатели, а с другой – разгибатели кисти являются антагонистами. И, наоборот, если выполнять приведение и отведение кисти, они становятся синергистами.
Сложение сил сокращающихся мышц. При сокращении мышцы возникает активная двигательная сила, которая стремится сблизить punctum mobile и punctum fixum. Мышечная сила характеризуется степенью сокращения мышцы, способной при возбуждении удержать в этом состоянии груз до 4-6 кг на 1 см 2 поперечника мышцы. Величина силы зависит от исходной длины мышечных волокон. Предварительно, но не чрезмерно растянутая мышца развивает более высокое напряжение. Активная мышечная сила больше всего развивается в мышцах, построенных из длинных волокон (широкие и веретенообразные мышцы). Мышца может сократиться на 50-57% первоначальной ее длины, но ввиду ограничения степеней свободы суставов она сокращается, как правило, на 35%.
Активная мышечная сила группы мышц (синергистов или антагонистов) складывается из суммы подъемной силы каждой мышцы, а точка приложения этой силы располагается между местами прикрепления всех длинных мышц. Однако у человека только единичные мышцы занимают параллельное друг другу положение. Большей частью их равнодействующие находятся под определенным углом, образуя параллелограммы сил.
Параллелограммы сил. Располагаясь под углом друг к другу, мышцы тянут кость в различных направлениях. В этом случае движение кости совершается не по равнодействующей одной или второй мышцы, а по диагонали параллелограмма, построенного сокращающимися мышцами (рис. 164). Параллелограммы сил могут формироваться и целыми мышечными группами.
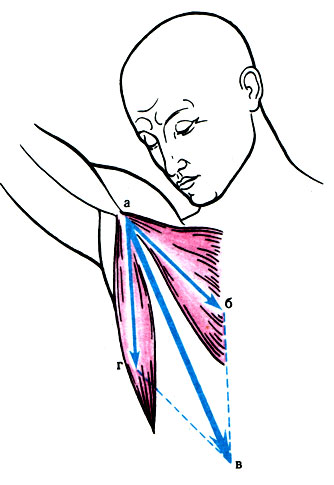
164. Параллелограмм сил (по М. Ф. Иваницкому). аб – направление тяги большой грудной мышцы; аг – направление тяги широчайшей мышцы спины. При совместной работе эти мышцы тянут плечевую кость в направлении ав, т. е. по диагонали параллелограмма сил
Источники
- Синяченко, О. В. Диагностика и лечение болезней суставов / О. В. Синяченко. – М. : ЭЛБИ-СПб, Издатель А. Ю. Заславский, 2012. – 562 c.
- Тумко, И. Н. Лучшие методы лечения остеохондроза / И. Н. Тумко. – М. : Фолио, 2012. – 154 c.
- Труфанов, Геннадий Евгеньевич Лучевая диагностика заболеваний и повреждений локтевого сустава / Труфанов Геннадий Евгеньевич. – М. : Элби, 2014. – 900 c.
- Константинов, Юрий Избавляемся от подагры народными методами / Юрий Константинов. – М. : Центрполиграф, 2016. – 801 c.

Позвольте представиться. Меня зовут Инна. Я уже более 7 лет работаю медицинской сестрой в ревматологическом центре. Я считаю, что в настоящее время являюсь профессионалом в своей области и хочу научить всех посетителей сайта решать сложные и не очень задачи. Все материалы для сайта собраны и тщательно переработаны с целью донести в удобном виде всю необходимую информацию. Однако чтобы применить все, описанное на сайте необходима ОБЯЗАТЕЛЬНАЯ консультация с профессионалами.

{kind=link}