Предлагаем ознакомится со статьей на тему: "сколько степеней свободы в плечевом суставе" с детальными комментариями и методологией лечения и профилактики.
Плечевой сустав, или проксимальный сустав верхней конечности, – самый мобильный из всех суставов человеческого тела.
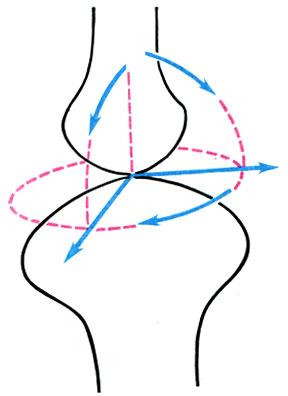
Он обладает тремя степенями свободы, что позволяет верхней конечности совершать движения в трех плоскостях в пространстве и по отношению к трем основным осям.
1) Поперечная ось, лежащая во фронтальной плоскости, контролирует движения сгибания и разгибания, осуществляемые в сагиттальной плоскости.
2) Переднезадняя ось, лежащая в сагиттальной плоскости, контролирует движения отведения (движение верхней конечности по направлению от туловища) и приведения (движение верхней конечности по направлению к туловищу), которые реализуются во фронтальной плоскости.
3) Вертикальная ось, проходящая через пересечение сагиттальной и фронтальной плоскостей и соответствующая третьей пространственной оси, контролирует движения сгибания и разгибания, происходящие в горизонтальной плоскости, когда плечо отведено на 90°, называемой также горизонтальной флексией – экстезией.
По отношению к продольной оси 4 осуществляется наружная и внутренняя ротация плеча и всей верхней конечности:
• произвольная ротация, или заместительная ротация Мак Конэлла, которая зависит от наличия третьей степени свободы движений и может осуществляться только в шаровидных суставах с тремя осями; это движение обеспечивается сокращением мышц-ротаторов;
• автоматическая ротация, или сочетанная ротация Мак Конэлла, которая происходит безо всякого произвольного действия в суставах с двумя и даже тремя осями движения, если в последних используются только две оси. Мы еще вернемся к этому, когда будем рассматривать парадокс Кодмана.
В нейтральном положении верхняя конечность свободно свисает вдоль туловища, так что продольная ось плеча 4 совпадает с вертикальной осью 3 верхней конечности. Продольная ось плеча 4 совпадает с поперечной осью 1 при отведении на 90° и с переднезадней осью 2 при сгибании на 90°.
Таким образом, плечевой сустав имеет три основных оси и три степени свободы движения. Продольная ось плеча может совпадать с любой из этих осей или занимать любое промежуточное положение, позволяя тем самым наружную или внутреннюю ротацию.
Коаптация суставных поверхностей под действием околосуставных мышц
Околосуставные мышцы, проходящие в поперечном направлении, действуют как активные связки и прижимают головку плечевой кости к суставной впадине.
Длинные мышцы верхней конечности и плечевого пояса обладают тонической активностью и препятствуют вывиху головки плеча книзу под действием переносимого в руке груза или срезывающего веса самой верхней конечности. Нижний вывих можно видеть при синдроме «болтающейся руки», когда по какой-то причине мышцы плечевого пояса и верхней конечности парализованы.
С другой стороны, если длинные мышцы доминируют, то поперечные мышцы предотвращают вывих головки плечевого сустава кверху.
Таким образом, эти две группы мышц являются антагонистами и синергистами по отношению друг к другу.
Вид поперечных мышц сзади:
1) Надостная мышца 1 берет начало от ямки лопатки и оканчивается на верхней фасетке бугорка плечевой кости.
2) Подостная мышца 3 прикрепляется к верхней части ямки лопатки и оканчивается на задневерхней фасетке бугорка плечевой кости.
3) Малая круглая 4 прикрепляется к нижней части ямки лопатки и оканчивается на задненижней части фасетки бугорка плечевой кости.
На виде спереди.
Надостная мышца 1.
Подлопаточная 2 — мощная мышца, прикрепляющаяся ко всей передней поверхности ямки лопатки и оканчивающаяся на бугорке плечевой кости.
Сухожилие длинной головки двуглавой мышцы плеча 5. Когда эта мышца сокращается, ее сухожилие, прикрепляющееся к надсуставному бугорку, загоняет головку плеча внутрь, выполняя функцию поперечных мышц, посредством «эффекта памяти».
Этот эффект заключается в сгибании локтевого сустава при поднятии тяжести.
На виде сверху представлена «верхняя защита» плечевого сустава: надостная мышца 1, сухожилие длинной головки двуглавой мышцы 5, расположенные над суставом.
Длинные мышцы – коаптаторы (вид сзади) представлены тремя мышцами:
1) дельтовидная мышца 8, состоящая из двух пучков – латерального 8 и заднего 8′, который поднимает головку плечевой кости во время отведения;
2) трехглавая мышца плеча (ее длинная головка) 7, прикрепленная к подсуставному бугорку лопатки – прижимает головку плечевой кости к суставной капсуле при разгибании локтевого сустава.
Длинные мышцы – коаптаторы (вид спереди), более многочисленны:
1) дельтовидная мышца 8 с ее двумя пучками (латеральным 8 и передним), ключичная мышца (не показана на рисунке);
2) сухожилие длинной головки двуглавой мышцы 5, а также ее короткая головка, прикрепленная к клювовидному апофизу, вблизи от клювовидноплечевого 6. Это сухожилие при сгибании локтя и плеча приводит головку плечевой кости кверху;
3) ключичные пучки большой грудной мышцы 9 содействуют передним тяжам дельтовидной мышцы, но в первую очередь осуществляют сгибание и приведение плеча.
Некоторые авторы полагают, что кроме этого суставные поверхности удерживаются в контакте под действием атмосферного давления, но не в суставной полости, а под околосуставной мышечной манжетой.
Однако недавние электромиографические исследования показали, что эти мышцы активизируются только при ношении больших грузов. Обычно же головка плеча поддерживается не столько клювовидноплечевой связкой, как считали ранее, сколько нижними волокнами суставной капсулы, как это было продемонстрировано недавно работами Фишера с соавторами.
Как известно, тело, ничем не ограниченное в движениях, называется свободным, так как может двигаться в любом направлении. Отсюда, каждое свободное твердое тело имеет шесть степеней свободы движения. Оно обладает возможностью производить следующие перемещения: три перемещения поступательного характера, соответственно трем основным системам координат, и три вращательных движения вокруг этих трех координатных осей.
Наложение связей (закрепление) уменьшает количество степеней свободы. Так, если тело в одной своей точке закреплено, оно не может производить перемещение вдоль координатных осей, его движения ограничиваются лишь вращением вокруг этих осей, т.е. тело имеет три степени свободы. В том случае, когда закрепленными являются две точки, тело обладает только одной степенью свободы, оно может лишь вращаться вокруг линии (оси), проходящей через обе эти точки. И наконец, при трех закрепленных точках, не лежащих на одной линии, количество степеней свободы равно нулю, и никаких движений тела быть не может. У человека пассивный аппарат движения составляют части его тела, называемые звеньями. Все они соединены между собой, поэтому теряют возможность к трем видам движений вдоль координатных осей. У них остаются только возможности вращения вокруг этих осей. Таким образом, максимальное количество степеней свободы, которым может обладать одно звено тела по отношению к другому звену, смежному с ним, равняется трем.
Это относится к наиболее подвижным суставам человеческого тела, имеющим шаровидную форму.
Последовательно или разветвленные соединения частей тела (звеньев) образуют кинематические цепи.
У человека различают:
- — открытые кинематические цепи, имеющие свободный подвижный конец, закрепленный лишь на одном своем конце (например, рука по отношению к туловищу);
- — замкнутые кинематические цепи, закрепленные на обоих концах (например, позвонок — ребро — грудина — ребро — позвонок).
В открытых кинематических цепях человеческого тела подвижность исчисляется десятками степеней свободы. Например, подвижность запястья относительно лопатки и подвижность предплюсны относительно таза насчитывает по семь степеней свободы, а кончики пальцев кисти относительно грудной клетки — 16 степеней свободы. Если суммировать все степени свободы конечностей и головы относительно туловища, то это выразится числом 105, слагающимся из следующих позиций:
- — голова — 3 степени свободы;
- — руки — 14 степеней свободы;
- — ноги — 12 степеней свободы;
- — кисти и стопы — 76 степеней свободы.
Для сравнения укажем, что преобладающее большинство машин обладает всего одной степенью свободы движений.
В шаровидных суставах возможны вращения около трех взаимно перпендикулярных осей. Общее же количество осей, около которых возможны в этих суставах вращения, до бесконечности велико. Следовательно, относительно шаровидных суставов можно сказать, что сочленяющиеся в них звенья из возможных шести степеней свободы движений имеют три степени свободы и три степени связанности.
Меньшей подвижностью обладают суставы с двумя степенями свободы движений и четырьмя степенями связанности. К ним относятся суставы яйцевидной или эллипсовидной и седловиной форм, т.е. двухосные. В них возможны движения вокруг этих двух осей.
Одну степень свободы подвижности и вместе с этим пять степеней связанности имеют звенья тела в тех суставах, которые обладают одной осью вращения, т.е. имеют две закрепленные точки.
В преобладающей части суставов тела человека две или три степени свободы. При нескольких степенях свободы движений (двух или более) возможно бесчисленное множество траекторий. Соединения костей черепа имеют шесть степеней связанности и являются неподвижными. Соединение костей при помощи хрящей и связок (синхондрозы и синдесмозы) могут иметь в некоторых случаях значительную подвижность, которая зависит от эластичности и от размеров хрящевых или соединительнотканных образований, находящихся между данными костями.
Заполните эту форму, и мы с вами свяжемся









Ловим продолжение про суставы. Из прошлой статьи мы поняли, что если суставы есть «значит – это кому-нибудь нужно» (с). Кроме того, чтобы руки, ноги не отваливались от тела, суставы фактически обеспечивают движение (кости и мышцы сами не справляются).
Тело трейсера, как и любое другое, подвержено законам, особенно законам механики. Грубо говоря, у наших суставов есть степени свободы – количество плоскостей, в которых может двигаться сустав. Здесь больше не всегда значит лучше.
Степени свободы определяются количеством осей, вокруг которых могут совершаться движения. А количество осей напрямую зависит от формы костей, образующих сустав (их поверхностей).
От этого и будем отталкиваться:
1) Есть одноосные суставы:
А) Цилиндрический, например, позвонки около головы – вращаются вокруг вертикальной оси тела.
Б) Блоковидный, например фаланги пальцев. Фактически двигается так же как цилиндрический, различие – как происходит движение: поперечно или продольно длине костей (в этом случае продольно).
2) Двухосные суставы:
А) Эллипсовидный сустав, например кисть (лучезапястный сустав). Двигается уже вокруг 2 осей. Поверхности, образующие сустав – похожи на части эллипса, откуда и название.
Б) Мыщелковый сустав, например колено. Является переходной формой между блоковидным и эллипсовидным суставом, т.к. по соприкасающимся поверхностям больше похож на блоковидный, но из-за особенностей имеет 2 степени свободы.
3) Многоосные суставы. Здесь нам интересны Шаровидные суставы (плечо) и чашеобразные суставы (таз). Они имеют 3 степени свободы и образованы выпуклой головкой и вогутой впадиной. Разница между ними двумя в том, насколько глубоко погружена головка. У плеча она не глубоко, у таза – глубже. Поэтому тазобедренные суставы не такие подвижные как плечевые.
Мы опустили несколько видов суставов, которые нам не так интересны (седловидные, плоские и др.)
САМОЕ ГЛАВНОЕ. Зачем Вам это? Большая часть травм происходит из-за неправильной нагрузки на сустав, т.е. действия на него векторов сил, не согласующихся с имеющимися степенями свободы сустава. Колено вы, конечно, можете согнуть вовнутрь, то, к сожалению, всего один раз.
Число степеней свободы движений соответствует количеству возможных независимых линейных и угловых перемещений.
Тело, ничем не ограниченное в движении, называется свободным. Движение свободного тела возможно в трех основных направлениях- вдоль осей координат, а также вращение вокруг этих трех осей, т. е. тело имеет 6 степеней свободы движения.
Наложение связей уменьшает количество степеней свободы. Если закрепить одну точку тела, то сразу снимается 3 степени свободы- у тела остается возможность вращения вокруг трех осей. Так соединены кости трехосных суставов.(шаровидных). При закреплении двух точек в теле возможно вращение вокруг линии (оси), проходящей через обе точки. Так соединены кости одноосных суставов. В преобладающей части суставов тела человека 2 или 3 степени свободы, из чего следует, что в движениях в неодноосных суставах отсутствует определенность, задаваемая способом соединения.
Управление движениями звеньев сводится к ограничению избыточных степеней свободы
Для выполнения определенного движения требуется решить задачи: а) выбора необходимой траектории, б) управления движением по траектории(направлением и величиной скорости) и в) регуляции движения, понимаемой как борьба с помехами, сбивающими с траектории.
В суставном движении различают ось, плоскость, и размах. Все пары звеньев связаны в суставах неразрывно, как в шарнирах, поэтому они могут двигаться в основном только вокруг осей Число основных осей сустава соответствует количеству степеней свободы движений одного звена относительно другого. Геометрические оси вращения не постоянны и следует говорить о мгновенных осях вращения. Плоскость движения перпендикулярна оси вращения и характеризует направление перемещения звена. Размах движений – это угловое перемещение звена из одного крайнего положения в другое. Размахом движений измеряется подвижность в каждом суставе. Общий размах движения в целом бывает меньше суммы размахов изолированных движений.в суставах
Звенья тела как рычаги и маятники.
Скелет, составленный из подвижно соединенных костей, представляет собой твердую основу биокинематических цепей. Звенья цепей с приложенными к ним силами (внутренними и внешними)рассматриваются как система составных рычагов.
Рычаг- это твердое тело, которое тело, которое может под действием приложенных сил вращаться вокруг оси (опоры)в двух противоположных направлениях, а также сохранять свое положение.
Как простейший механизм, рычаг служит для передачи движениям силы на расстояние.
Каждый рычаг имеет точку опоры — ось рычага (О на рис. 2), точки приложения двух взаимно противодействующих сил (G и Q). Чтобы определить расстояние до места приложения сил от оси рычага, измеряют плечи рычага (ОА и ОВ). Чтобы определить расстояния до направления действия сил от оси рычага, измеряют плечи сил (d — перпендикуляры, опущенные из точки О на линии действия сил, т. е. их направления).
Рычаги бывают одноплечие(с точкой опоры на конце рычага) и двуплечие (с точкой опоры между концами рычага).
Мерой действия силы на рычаг служит ее момент относительно точки опоры
(произведение силы на ее плечо)
Звенья тела человека имеют в своей основе костные рычаги Двуплечие рычаги используются, например, при сохранении положения стоя, а одноплечие- в быстрых движениях конечностей (см. рис 3).
Условия сохранения положения звеньев и их движения как рычагов.
Моментом силы М относительно оси вращения называется произведение величины силы на ее плечо:
Момент силы берется со знаком «+», если сила стремится повернуть тело против часовой стрелке и со знаком «-« в противном случае. Момент силы количественно характеризует вращательное действие силы.
Для равновесия рычага необходимо равенство моментов приложенных сил относительно оси рычага ::рычаг будет находиться в равновесии, когда алгебраическая сумма моментов всех действующих на него сил относительно его неподвижной точки О равна нулю:
Подбирая соотношения плеч, можно изменять соотношение сил. Рычаги, показанные на рис 2 и 3 иллюстрируют эту закономерность

Рис. 2 Равновесие рычагов 1-го (а) и 2-го (б) рода

Когда момент одной из сил больше момента ругой, возникает ускорение в ту сторону., куда направлена сила большего момента.

Рис. 3 Костные рычаги.
а)-двуплечий; б)-одноплечий; в- вращающая сотавляющая F и укрепляющая F при различных углах ее приложения.

Следует подчеркнуть, что в реальных движениях изменяются положения костных рычагов и углы приложения сил. Следовательно, изменяются плечи сил. Длина мышц тоже не остается постоянной. Все это делает задачу управления движениями сложной проблемой.
Золотое правило механики в движениях человека.
Работа, совершаемая силою, приложенной на одном плече рычага, передается на другое.
Сила тяги мышцы, приложенная на коротком плече рычага, вызывает во столько раз большее смещение другого плеча, во сколько раз первое плечо короче второго (выигрыш в пути). Так как разные пути проходятся за одно и то же время, имеет место также и выигрыш в скорости. При этом сила, передаваемая на длинное плечо рычага, ровно во столько же раз меньше, чем приложенная.. Следовательно, выигрыш в скорости достигается за счет проигрыша в силе.
Почти все мышцы в теле человека прикрепляются вблизи суставов (короткое плечо рычага); это приводит к выигрышу в пути (а, следовательно, и в скорости) при проигрыше в силе. При большей части положений костного рычага мышечные тяги направлены под острым или тупым углом к звену (вдоль звена), что влечет невосполнимые потери в силе мышц (уменьшается вращающая тяга). Нормальная же (скрытая) тяга в этом случае способствует укреплению сустава, через который мышца переходит.
При больших нагрузках напрягаются все мышцы, окружающие сустав, в том числе и антагонисты. При этом резко возрастают потери в суммарной тяге мышц; в то же время достигается и положительный эффект — укрепление нагруженного сустава.
В связи с особенностями приложения мышечных тяг к костным рычагам необходимы весьма значительные напряжения мышц для выполнения не только силовых, но и скоростных движений.
Входящие в биокинематические цепи звенья тела образуют системы составных рычагов, в которых «золотое правило» механики проявляется намного сложнее, чем в простых одиночных рычагах.
Рассмотренная система костных рычагов первого, второго и третьего рода представляет рабочую систему в механическом значении только при определенных условиях. Одним из этих условий являются открытые и закрытые кинематические цепи и степени свободы. В замкнутой системе кинематической цепи оба конца какой-либо части тела закреплены (ребра, закрепленные передними и задними концами, или нижние конечности при стоянии).
При выполнении движений всегда вовлекаются цепи звеньев двигательного аппарата, которые закреплены на одном конце (рука, прикрепленная одним концом к лопатке) и представляют открытую кинематическую цепь.
Рис. 1. Пять степеней свободы тела, соприкасающегося одной точкой с другим телом
Если сопоставить соединения в суставах с соединениями частей технической машины, то обнаруживаются существенные отличия. У машины движения единообразны и обладают только одной степенью свободы.
Как указывалось выше, движения у человека складываются в кинематические цепи и практически не осуществляются суставом с одной степенью свободы, поэтому двигательный аппарат человека не является рабочей машиной. Он становится ею только тогда, когда благодаря напряжению мышц исключаются и тормозятся движения, при которых как бы дополнительно возникают “запирающие” сустав механизмы. Тонус мышц и его чередование направляют движения в суставах, тем самым “. устраняются все свободы перемещения, за исключением одной”*. Следовательно, за счет перераспределения работы мышц и их тонуса возможно построение многих механизмов с различным числом степеней свободы.
* (Ухтомский А. А. Физиология двигательного аппарата. Сб. соч. Т. III Л., 1945, с. 145.)
ПАРА СИЛ
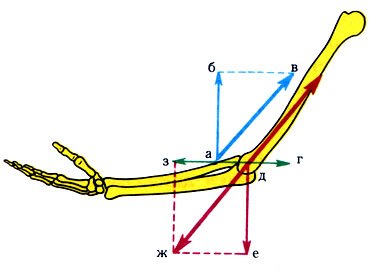
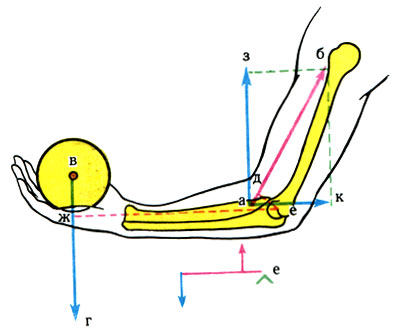
Выше говорилось, что для совершения вращательного движения необходима пара сил, которая складывается из сил сокращающейся мышцы и силы давления или сопротивления, возникающего от трения одной кости о суставную поверхность другой. На примере сгибания в локтевом суставе видно (рис. 2), что сила тяги двуглавой мышцы может быть разложена на составляющие: АБ – момент силы и АГ – силу давления костей предплечья на плечевую кость. Сила, распространяющаяся по диагонали АВ, представляет давление, производимое вдоль плечевой кости, которому противодействует сила давления ДЖ, разложенная на ДЕ и ДЗ. Момент силы АБ вместе с силой ДЖ представляет пару сил, выполняющих сгибание в локтевом суставе. Если бы сила давления отсутствовала, а это возможно при отсутствии оси вращения, то вместо сгибания в локтевом суставе произошло бы подтягивание предплечья. Зная условия, при которых изменяется плечо силы тяги мышц, и механические условия проявления мышечной силы, легко понять, каким образом в процессе построения движений происходит потеря или увеличение мышечной силы.
Рис. 2 . Схема действия ‘пары сил’ (по М. Ф. Иваницкому). ав – равнодействующая двуглавой мышцы плеча; дж – противодействие со стороны плечевой кости; аб – ‘полезная’ составляющая двуглавой мышцы плеча; аг – другая составляющая той же мышцы, способствующая давлению предплечья на плечо в локтевом суставе; де – составляющие силы давления плечевой кости на предплечье; ад – плечо пары сил, из которых одна сила аб, а другая – де. Благодаря работе пары сил сокращение двуглавой мышцы плеча способствует сгибанию в локтевом суставе



Работу двигательного аппарата человека обычно излагают с позиций общих законов механики, вполне применимых для оценки системы опорно-двигательного аппарата как системы рычагов. Рычагом называется всякое твердое тело, способное совершать вращательные движения около оси, на плечи которого действуют две противоположные силы: движущая сила (мышечные сокращения) и сила сопротивления. В зависимости от величины движущей силы и силы сопротивления возможно равновесие или движение рычага. Для понимания равновесия или движения рычага необходимо иметь определенное представление о плече рычага и о моменте вращения силы.
Плечом рычага называют расстояние оси вращения (О) до точки приложения силы (ОА и ОБ). Плечом силы называют кратчайшее расстояние – перпендикуляр от оси вращения до вектора силы или его продолжения (OA1 и OБ1) (рис. 158).
158. Схема рычага. Плечи рычага (ОА и ОБ), плечи сил (OA1 и OБ1)
Участие каждой мышцы в выполнении движений зависит не только от величины подъемной силы, но также и от величины плеча рычага, что определяется моментом силы. Моментом силы называется произведение силы на ее плечо. Моментом силы FI будет произведение FI·OAI или FI·Sin ОА; моментом силы FII будет FII·OБI, или FII·Sin·OБ. Таким образом, условие для равновесия рычага достигается тогда, когда сумма моментов сил, действующих на него, относительно оси вращения равна нулю. Если равенство моментов сил нарушается, то рычаг начинает вращаться в направлении той силы, момент которой больше. Момент силы является непостоянной величиной, обусловленной положением одних костей по отношению к другим, образующим данное сочленение. Поэтому при сгибании в суставе будет нарастать плечо рычага сгибателей и соответственно момент силы, т. е. увеличивается угол подхода сухожилия к мышце, что способствует повышению подъемной силы мышцы. В большей части случаев мышцы прикрепляются вблизи суставов и подходят к костям под острым углом. При этом плечо силы меньше плеча сопротивления; при подобном прикреплении мышцы проигрывают в силе.
В опорно-двигательной системе имеются образования, способствующие увеличению плеча силы мышц, благодаря чему значительно повышается момент силы. К этим образованиям относятся сесамовидные кости, блоки, костные отростки и бугры, разнообразные выступы и шероховатости. За счет этих образований значительно возрастает момент силы мышц. Следовательно, сила мышцы зависит не только от количества мышечных волокон, но и от плеча рычага.
Виды рычагов. В зависимости от расположения движущей силы (мышечное сокращение) и силы сопротивления относительно оси вращения различают рычаги первого, второго и третьего рода.
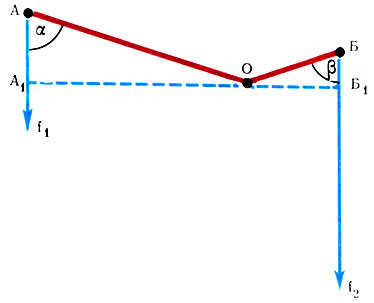
Рычаг первого рода является двуплечим. Обе силы имеют одинаковое направление, а между ними находится ось вращения данного рычага (рис. 159). Рычаг первого рода называют также рычагом равновесия. Например, атлантозатылочное сочленение и тазобедренный сустав представляют оси вращения рычагов первого рода, по сторонам от которых располагаются плечи рычагов.
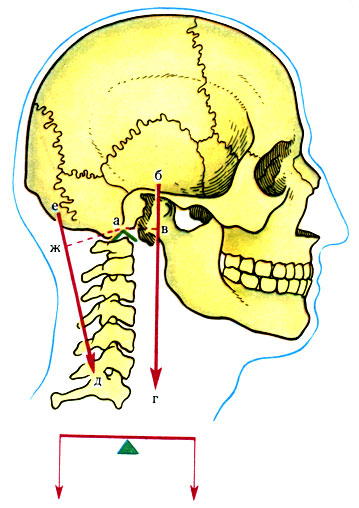
159. Двуплечий рычаг первого рода, например положение головы. а – поперечная ось атлантозатылочного сочленения; бг – направление силы тяжести; ед – направление мышечной тяги; ав – плечо рычага силы тяжести; аж – плечо силы мышечной тяги
Рычаг второго рода – одноплечий рычаг, так как приложения сил имеют противоположные направления. Движущая сила оказывает действие на длинное плечо рычага, а сила сопротивления – на короткое плечо (рис. 160). Например, в голеностопном суставе одна сила действует вверх, другая – вниз. Давление, которое возникает в оси вращения рычага, соответствует разности действующих сил. Действие мышцы в конструктивной особенности рычага второго рода направлено на выполнение движений, требующих большой мышечной силы, поэтому рычаг второго рода называют также рычагом силы.
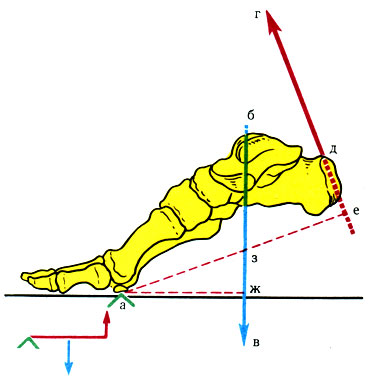
160. Стопа как рычаг второго рода. а – точка опоры; бв – направление силы тяжести; дг – направление равнодействующей силы мышечной тяги; ае – плечо рычага силы мышечной тяги; аж – плечо рычага силы тяжести
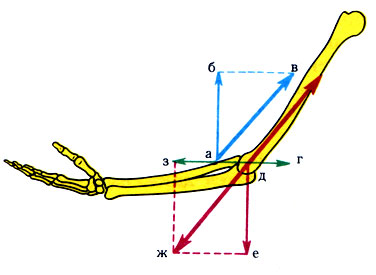
Рычаг третьего рода хотя и является одноплечим рычагом, но его отличие от рычага второго рода заключается в том, что сила действует на короткое плечо, а плечо сопротивления – на длинное (рис. 161). Рычаг третьего рода можно назвать рычагом скорости. Например, при выполнении сгибания в локтевом суставе длинное плечо силы – предплечье – совершает больший размах движений, чем короткое плечо силы, идущей от лучевой бугристости до локтевого сустава. Таким образом, при действии на короткое плечо мышца выигрывает в скорости и расстоянии и проигрывает в силе.
161. Предплечье как рычаг третьего рода. аб – направление равнодействующей мышц-сгибателей предплечья; вг – направление силы тяжести или сопротивления, же – плечо рычага силы тяжести; де – плечо рычага силы мышечной тяги; ж – плечо рычага силы тяжести; аз – ‘полезная’ составляющая силы мышечной тяги; ак – другая составляющая этой силы; е – поперечная ось вращения локтевого сустава
В процессе построения движений у человека постоянно наблюдаются различные биомеханические особенности в смене, разделении и объединении различных рычагов, что необходимо для выполнения движений с наибольшей экономией энергии.
Кинематические цепи и степени свободы. Рассмотренная выше система костных рычагов первого, второго и третьего рода представляет рабочую систему в механическом значении только при определенных условиях. Одним из этих условий являются открытые и закрытые кинематические цепи и степени свободы. В замкнутой системе кинематической цепи оба конца какой-либо части тела закреплены (ребра, закрепленные передними и задними концами, или нижние конечности при стоянии).
При выполнении движений всегда вовлекаются цепи звеньев двигательного аппарата, которые закреплены на одном конце (рука, прикрепленная одним концом к лопатке) и представляют открытую кинематическую цепь.
162. Пять степеней свободы тела, соприкасающегося одной точкой с другим телом
Если сопоставить соединения в суставах с соединениями частей технической машины, то обнаруживаются существенные отличия. У машины движения единообразны и обладают только одной степенью свободы.
Как указывалось выше, движения у человека складываются в кинематические цепи и практически не осуществляются суставом с одной степенью свободы, поэтому двигательный аппарат человека не является рабочей машиной. Он становится ею только тогда, когда благодаря напряжению мышц исключаются и тормозятся движения, при которых как бы дополнительно возникают “запирающие” сустав механизмы. Тонус мышц и его чередование направляют движения в суставах, тем самым “. устраняются все свободы перемещения, за исключением одной” * . Следовательно, за счет перераспределения работы мышц и их тонуса возможно построение многих механизмов с различным числом степеней свободы.
* (Ухтомский А. А. Физиология двигательного аппарата. Сб. соч. Т. III Л., 1945, с. 145.)
Пара сил. Выше говорилось, что для совершения вращательного движения необходима пара сил, которая складывается из сил сокращающейся мышцы и силы давления или сопротивления, возникающего от трения одной кости о суставную поверхность другой. На примере сгибания в локтевом суставе видно (рис. 163), что сила тяги двуглавой мышцы может быть разложена на составляющие: АБ – момент силы и АГ – силу давления костей предплечья на плечевую кость. Сила, распространяющаяся по диагонали АВ, представляет давление, производимое вдоль плечевой кости, которому противодействует сила давления ДЖ, разложенная на ДЕ и ДЗ. Момент силы АБ вместе с силой ДЖ представляет пару сил, выполняющих сгибание в локтевом суставе. Если бы сила давления отсутствовала, а это возможно при отсутствии оси вращения, то вместо сгибания в локтевом суставе произошло бы подтягивание предплечья. Зная условия, при которых изменяется плечо силы тяги мышц, и механические условия проявления мышечной силы, легко понять, каким образом в процессе построения движений происходит потеря или увеличение мышечной силы.
163. Схема действия ‘пары сил’ (по М. Ф. Иваницкому). ав – равнодействующая двуглавой мышцы плеча; дж – противодействие со стороны плечевой кости; аб – ‘полезная’ составляющая двуглавой мышцы плеча; аг – другая составляющая той же мышцы, способствующая давлению предплечья на плечо в локтевом суставе; де – составляющие силы давления плечевой кости на предплечье; ад – плечо пары сил, из которых одна сила аб, а другая – де. Благодаря работе пары сил сокращение двуглавой мышцы плеча способствует сгибанию в локтевом суставе
Виды мышечной работы. С позиций биомеханики работа мышцы определяется в том случае, когда она производит перемещение части тела или тяжести на какое-либо расстояние. В действительности мышца выполняет работу, начиная с малейшего ее напряжения.
Мышечная работа разделяется на статическую и динамическую.
При статической работе часть мышц, напрягаясь, стремится уравновесить момент силы тяжести или силу сопротивления, что наблюдается при выравнивании или сохранении положения тела или его частей. При этом мышца не укорачивается, не удлиняется, а только напрягается. Статическая работа мышц необходима для сохранения вертикального положения тела или определенной позы. Выделяют три вида статической работы мышц: удерживающую, укрепляющую и фиксирующую. При удерживающей работе мышцы действуют своим моментом тяги, возникающей при сокращении, против момента силы тяжести. При укрепляющей работе напряжение мышц оказывает сопротивление разрыву. При фиксирующей работе сокращение мышц-антагонистов оказывает фиксирующее влияние на суставы.
При динамической работе движение в суставах происходит в результате несоответствия мышечных и механических сил. Динамическая работа мышц подразделяется на преодолевающую и уступающую. При преодолевающей работе мышечная сила больше противодействующей силы и в результате сокращения мышц преодолевается сопротивление, т. е. производится перемещение части тела или груза. Уступающая работа мышц возникает в том случае, если мышечные силы меньше момента противодействующих сил и наступает растягивание сокращенной мышцы. Этот вид работы мышц является важным и необходимым для обеспечения плавности и эластичности движений. Если бы не было подобного регулятора, движения были бы толчкообразными и малокоординированными.
Виды мышечной работы в процессе построения движений часто чередуются. Например, при отведении руки дельтовидная мышца выполняет преодолевающую работу. При удержании руки в горизонтальном положении производится статическая (удерживающая) работа мышцы, а при приведении этой руки – уступающая работа. Таким образом, в каждом виде движений на первый план выступает тот или другой вид мышечной работы.
Антагонисты и синергисты. К антагонистам относятся все мышцы, которые по своей функции действуют в сторону, противоположную другой группе мышц. Например, мышцы-сгибатели плеча являются антагонистами разгибателей плеча. К синергистам относятся все мышцы, которые, сокращаясь, одновременно действуют на сустав, находясь по одну сторону его оси. Примером могут служить сгибатели предплечья и плеча, вызывающие сгибание в локтевом суставе. Функции антагонистов и синергистов могут чередоваться. При выполнении сгибания и разгибания в лучезапястном суставе, с одной стороны, лучевой и локтевой сгибатели, а с другой – разгибатели кисти являются антагонистами. И, наоборот, если выполнять приведение и отведение кисти, они становятся синергистами.
Сложение сил сокращающихся мышц. При сокращении мышцы возникает активная двигательная сила, которая стремится сблизить punctum mobile и punctum fixum. Мышечная сила характеризуется степенью сокращения мышцы, способной при возбуждении удержать в этом состоянии груз до 4-6 кг на 1 см 2 поперечника мышцы. Величина силы зависит от исходной длины мышечных волокон. Предварительно, но не чрезмерно растянутая мышца развивает более высокое напряжение. Активная мышечная сила больше всего развивается в мышцах, построенных из длинных волокон (широкие и веретенообразные мышцы). Мышца может сократиться на 50-57% первоначальной ее длины, но ввиду ограничения степеней свободы суставов она сокращается, как правило, на 35%.
Активная мышечная сила группы мышц (синергистов или антагонистов) складывается из суммы подъемной силы каждой мышцы, а точка приложения этой силы располагается между местами прикрепления всех длинных мышц. Однако у человека только единичные мышцы занимают параллельное друг другу положение. Большей частью их равнодействующие находятся под определенным углом, образуя параллелограммы сил.
Параллелограммы сил. Располагаясь под углом друг к другу, мышцы тянут кость в различных направлениях. В этом случае движение кости совершается не по равнодействующей одной или второй мышцы, а по диагонали параллелограмма, построенного сокращающимися мышцами (рис. 164). Параллелограммы сил могут формироваться и целыми мышечными группами.
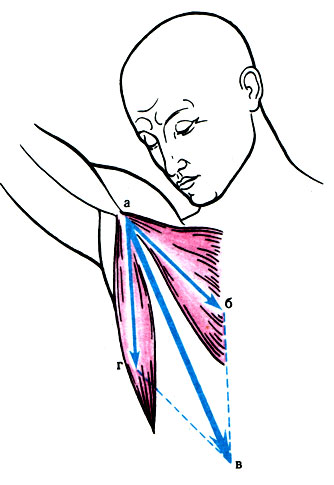
164. Параллелограмм сил (по М. Ф. Иваницкому). аб – направление тяги большой грудной мышцы; аг – направление тяги широчайшей мышцы спины. При совместной работе эти мышцы тянут плечевую кость в направлении ав, т. е. по диагонали параллелограмма сил
Источники
- Мазнев, Н. Артрит, артроз, подагра. Болезни суставов. Авторские методики лечения / Н. Мазнев. – М. : Рипол Классик, Дом. XXI век, 2010. – 512 c.
- Сурайё, Шукурова Кардиоренальные и метаболические нарушения при подагре / Шукурова Сурайё , Хисрав Тоиров und Дильфуза Джонназарова. – М. : LAP Lambert Academic Publishing, 2012. – 473 c.
- Соловьева, Е. В. Болят суставы: что делать? Артрит, артроз, радикулит, отложение солей / Е. В. Соловьева. – М. : СПб: Невский проспект, 2006. – 160 c.

Позвольте представиться. Меня зовут Инна. Я уже более 7 лет работаю медицинской сестрой в ревматологическом центре. Я считаю, что в настоящее время являюсь профессионалом в своей области и хочу научить всех посетителей сайта решать сложные и не очень задачи. Все материалы для сайта собраны и тщательно переработаны с целью донести в удобном виде всю необходимую информацию. Однако чтобы применить все, описанное на сайте необходима ОБЯЗАТЕЛЬНАЯ консультация с профессионалами.

{kind=link}